JaxPlan
pyRDDLGym-jax (or JaxPlan as it is referred to in the literature) is an extension of the pyRDDLGym eco-system, leveraging the JAX library to automatically build differentiable simulators for any RDDL problem and do gradient-based planning. It also supports various planning methods, including deep reactive policy networks and straight-line planning, risk-aware planning, and provides tools for automatic hyper-parameter tuning.
Purpose
The open-loop planning problem can be succinctly described mathematically as
\begin{equation} \max_{a_1, \dots a_T} E_{\xi_t}\left[\sum_{t=1}^T R(s_t)\right], \quad s_{t+1} = f(s_t, a_t, \xi_t) \end{equation}
where \(a_t\) is the action, \(s_t\) is the state, and \(\xi_t\) is an i.i.d. noise disturbance. If the reward function and transition model are differentiable, then it is possible to compute the gradient of the return
\begin{equation} \nabla_{a_{\tau}} R(s_t) = \frac{d R(s_t)}{d s_{t}} \frac{d s_{t}}{d a_{\tau}} = \frac{d R(s_t)}{d s_{t}} \frac{d s_{t}}{d s_{t-1}} \frac{d s_{t-1}}{d s_{t-2}}\dots \frac{d s_{\tau+2}}{d s_{\tau +1}} \frac{d s_{\tau + 1}}{d a_{\tau}}, \end{equation}
which, for \(t > \tau\), can be more explictly stated as
\begin{equation} \nabla_{a_{\tau}} R(s_t) = \frac{d R(s_t)}{d s_{t}} \frac{d s_{t}}{d a_{\tau}} = \frac{d R(s_t)}{d s_{t}} \frac{d f(s_\tau, a_\tau, \xi_\tau)}{d a_{\tau}} \prod_{k=\tau + 1}^{t-1}\frac{d f(s_k, a_k, \xi_k)}{d s_{k}}. \end{equation}
The actions can then be updated by backpropagating through the return as follows:
\begin{equation} a_\tau \gets a_\tau + \eta \sum_{t > \tau}\nabla_{a_{\tau}} R(s_t), \end{equation}
for some learning rate \(\eta > 0\). The closed-loop planning problem can be similarly defined by allowing actions to be a trainable function of the current state, i.e. \(a_t = \pi(s_t, \theta)\).
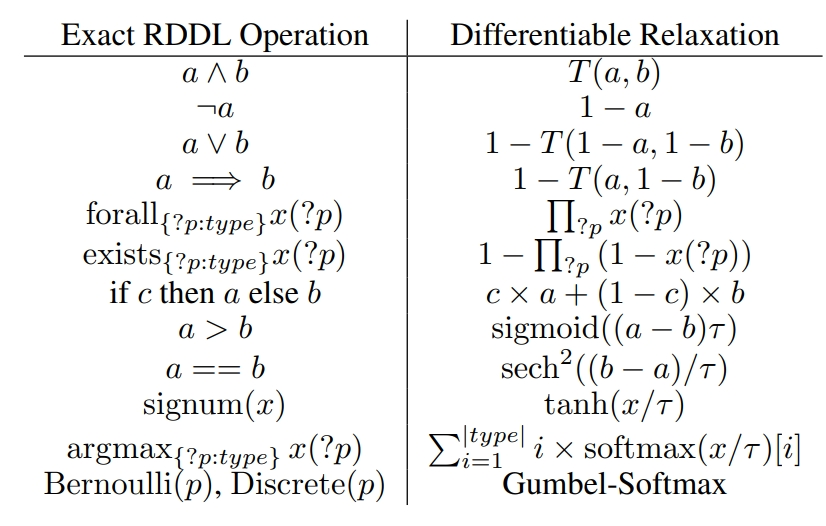
JaxPlan leverages JAX auto-differentiation to automatically compute the above gradients for any problem described in the RDDL Language, and state-of-the-art gradient descent algorithms such as ADAM to automatically compute the optimal sequence of actions for any problem. The planner is versatile and performs model relaxations when dealing with discrete domains, where the exact gradient would otherwise be impossible to compute (Gimelfarb et al., 2024).
Below are some successful (and cool!) examples where JaxPlan was able to solve the problem, or make substantial progress where some other planners failed:





JaxPlan was part of the official evaluation system in the 2023 International Planning Competition (Taitler et al., 2024)
Examples
JaxPlan can be easily set up on any Python environment that has the pyRDDLGym and JAX frameworks preinstalled. Simply create a config file to store hyper-parameters for the planner as described here, then run the following code:
import pyRDDLGym
from pyRDDLGym_jax.core.planner import JaxStraightLinePlan, JaxBackpropPlanner, JaxOfflineController, load_config
# set up the environment (note the vectorized option must be True)
env = pyRDDLGym.make("domain", "instance", vectorized=True)
# load the config file for the problem with hyper-parameters and set up the planner
planner_args, plan_args, train_args = load_config("/path/to/config.cfg")
plan = JaxStraightLinePlan(**plan_args)
planner = JaxBackpropPlanner(rddl=env.model, plan=plan, **planner_args)
controller = JaxOfflineController(planner, **train_args)
# evaluate the planner
controller.evaluate(env, episodes=1, verbose=True, render=True)
JaxPlan is highly configurable and scalable, and is capable of optimizing problems efficiently with dozens or even hundreds of observation or action variables.